
2021 대학생자작자동차대회 (KSAE Baja & Formula)
대회 설명
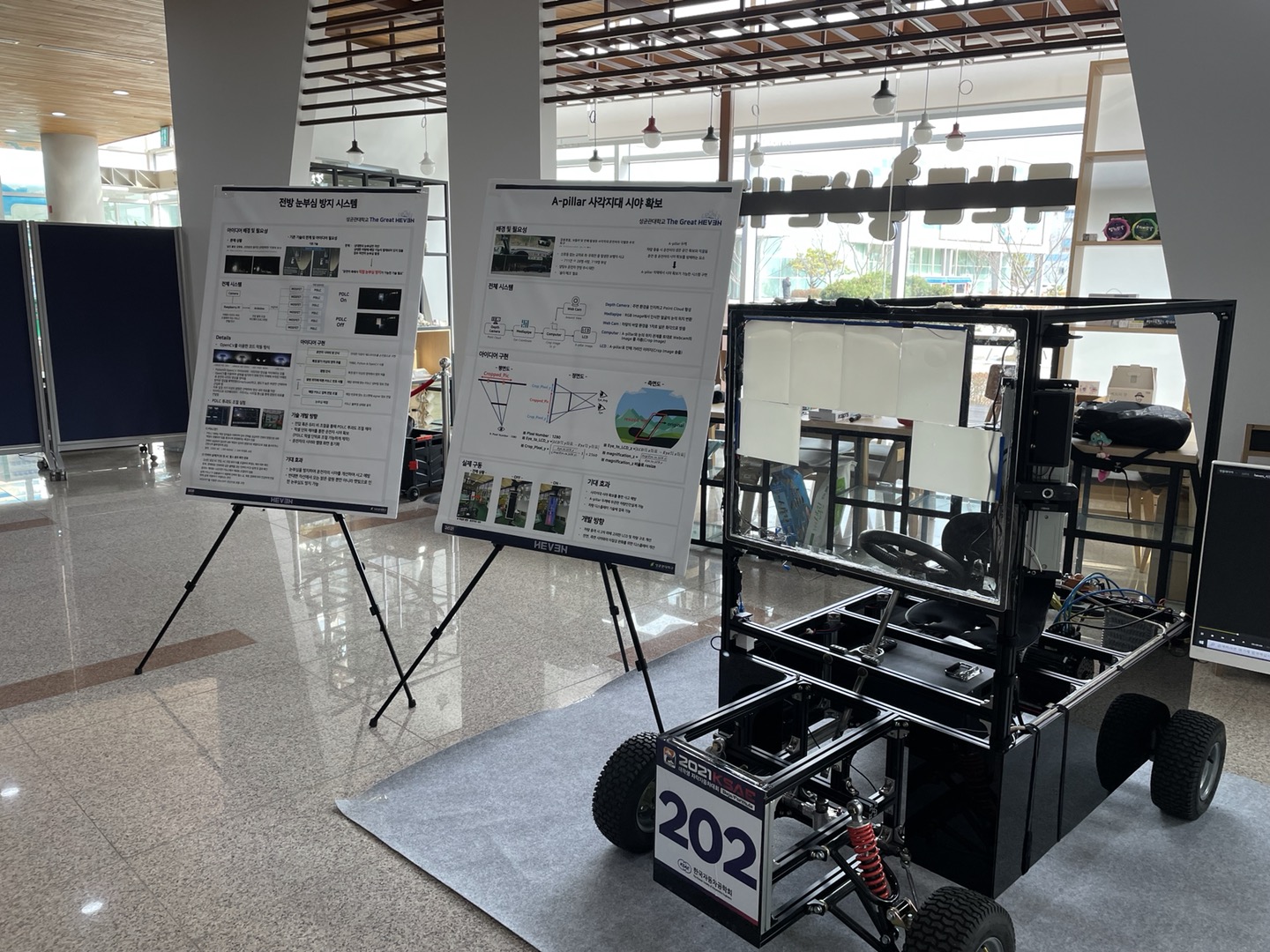
2021 대학생자작자동차대회는 군산 새만금 컨벤션센터에서 개최되는 자작자동차 대회입니다. 저는 미래 모빌리티에 적용되는 새로운 아이디어를 제시하는 기술아이디어 부문에 출전하였습니다.
팀빌딩
성균관대학교 자작자동차 동아리 HEVEN 소속으로, 총 22명의 팀원으로 출전하였습니다. 팀명은 HEVEN-A 입니다.

주제(아이디어)
저희 팀은 차량 주행시, 운전자의 시야 확보를 목표로 하여, 2가지 아이디어를 구상하여 출전하였습니다. 저는 PDLC 팀 코딩 팀장으로 개발 및 대회에 출전하였습니다.
PDLC를 이용한 전방 눈부심 방지 시스템
Depth Camera와 디스플레이를 활용한 A-pillar 시야각 확보
Github & Domain
Skills
Programming Language
- python
- OpenCV
Hardware
- 라즈베리파이
- 아두이노
- 웹캠
아이디어 구현
PDLC를 이용한 전방 눈부심 방지 시스템
실제 운전을 하다보면 전방 차량이 상향등을 켜고 주행하는 바람에 눈이 부셔서 전방 시야 확보가 어려울 때가 있습니다. 이런 문제점에 주목하여, 자동차의 앞유리에서 광원이 인식되는 영역만을 불투명하게 제어하여 시야를 확보하는 아이디어를 구상하였습니다.


< 상향등으로 인한 눈부심 효과 >
PDLC란?
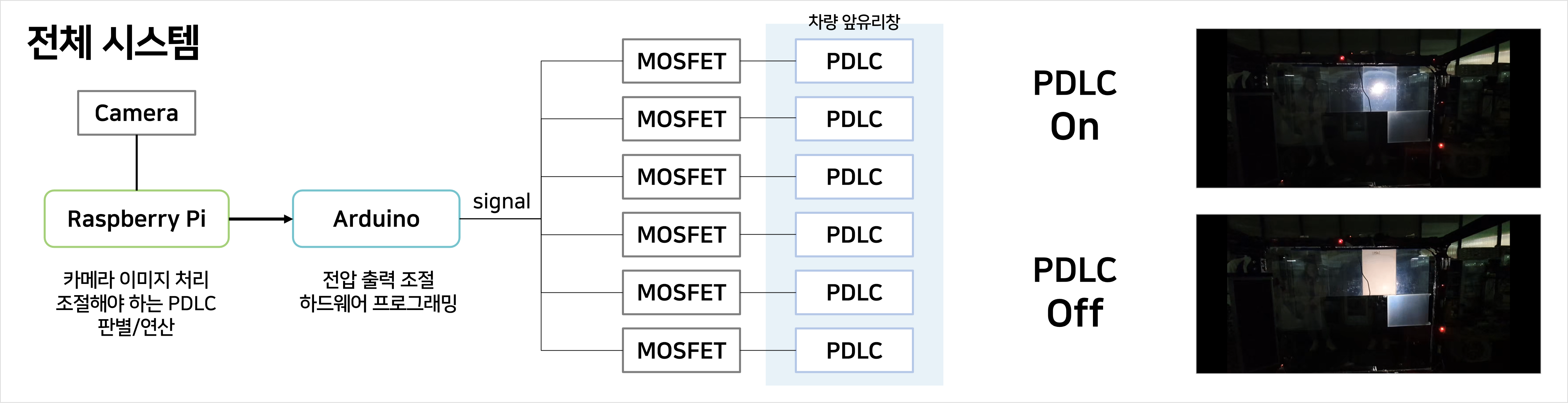
PDLC(Polymer Dispersed Liquid Crystal)는 내부가 액정 입자들로 이루어져 있어, 전력을 공급하면 전류의 방향으로 내부 액정이 정렬되어 빛을 통과시켜 투명해지는 성질을 가진 필름입니다.
AC 회로를 연결한 PDLC들을 자동차 앞유리에 부착하여, 듀티비를 조절하는 방법으로 불투명 기능을 구현했습니다.
광원감지 알고리즘
python의 OpenCV 라이브러리를 사용하여 광원을 탐지하는 알고리즘을 설계하였습니다. 먼저, 카메라로부터 받아온 영상을 흑백변환(GrayScale)한 후, 광도가 높은 부분만을 선택하여 군집화하였습니다. 이후 일정 크기 이상의 광원만 추출하여 영상 내의 좌표를 알아냅니다. 광원감지 알고리즘은 웹캠으로부터 받아오는 영상을 실시간으로 분석하여 광원의 위치를 빨간색 원으로 표시해 줍니다.

라즈베리파이 - 아두이노 시리얼 통신
광원 감지 알고리즘을 라즈베리파이에 설치한 후, 아두이노와 라즈베리파이를 연결합니다. 라즈베리파이로부터 시리얼통신하여 아두이노로 광원의 위치를 보내주면, 아두이노에서 그 영역에 해당하는 PDLC를 불투명하게 제어합니다.
담당역할
저는 대회 준비과정에서 PDLC 코딩 팀장으로 활동하였으며, 실시간 웹캠 영상으로부터 광원의 위치를 알아내는 코드를 개발했습니다.
빛을 감지하는 과정에서 밝은 영역과 단순히 흰색 영역을 구분하기 위해서 처음에는 hls 필터를 사용하려고 했는데, GrayScale이 되는 과정에서 이미 화소의 밝기정보를 0에서 255 사이의 값으로 수치화 한다는 것을 알게 되었습니다. 그래서 먼저 영상을 흑백변환한 후에, 특정 값 이상의 화소들만 남겨서 영상으로부터 밝은 부분을 찾아냈습니다.
다음으로 영상으로부터 흰색 영역이 광원임을 판단하기 위해서는, 흰색 화소가 서로 인접하게 연결되어서 하나의 덩어리로 이루어져있는지 확인해야 했습니다. 흰색 영역이 판별된 곳에서 상하좌우로 인접한 영역에 같은 흰색점이 존재하는지 판별하여서 덩어리, 즉 광원인지 판별하였습니다. 또한 특정 크기 이상의 영역만을 광원으로 설정하여 작은 불빛들은 고려하지 않도록 설정하였습니다.
성과
2021 대학생자작자동차대회 기술아이디어 부문에서 금상을 수상하였습니다!
ps. 코로나 이슈로 인해 2번이나 대회가 미뤄지면서 고생한 팀원들 다들 고생하셨습니다!!

Reference
PDLC 투명도 조절영상
광원 인식 알고리즘과 PDLC 불투명도 제어시스템 연동
댓글남기기